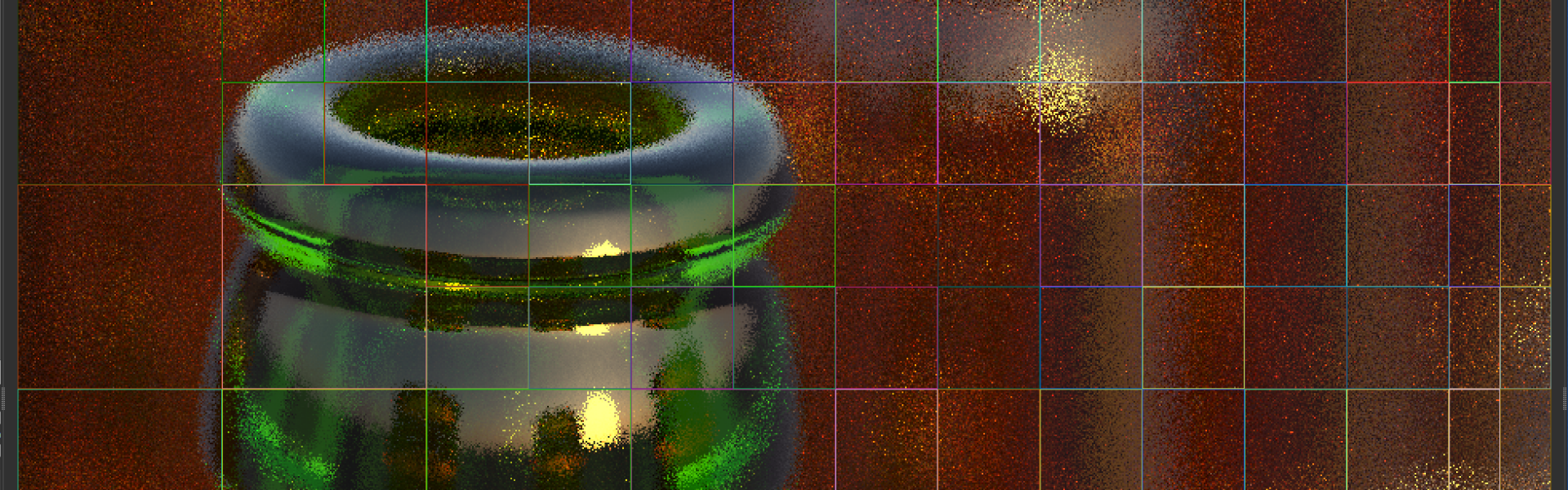
The benefits of bucket splitting
As the data is never thrown away, it’s always safe to split a bucket.
As the splitting happens only when there are idle threads, it’s always happening at the ideal time.
As the splitting happens without knowledge of the rendered image, the technique naturally lends itself to being optimal in sharing the workload, regardless of scene contents, or time already spent rendering: so long as there are free threads and pixels left to converge, the free threads will be put to work.
The general result is a decrease in render times, which vary depending on the scene and the number of cores in the CPU.
We have not yet measured a case where the new algorithm is slower than the older ones, such as no splitting, or naive splitting.
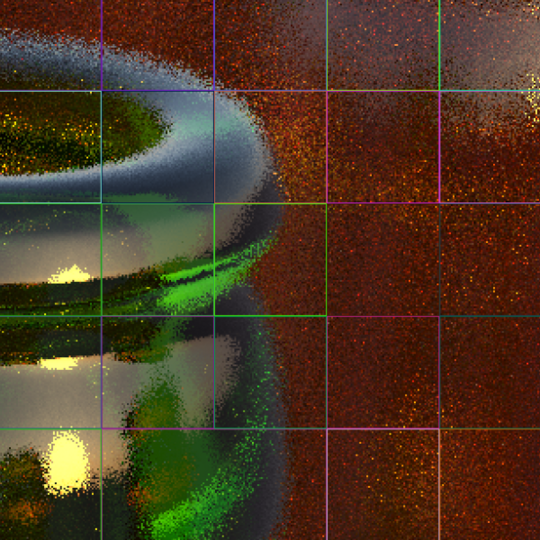
The limitations
The technique currently leaves the individual buckets single-threaded. This means that if, by sheer bad luck, the part taking the longest is one pixel in size, only one thread will be able to work on it. The stuck bucket will then be one pixel in size, but still present, and theoretically still able to take a long time to compute.
This specific approach is currently only viable for local rendering and doesn’t apply to distributed rendering, as that requires a slightly different approach to ensure network traffic stays low.
Research is ongoing to alleviate the current limitations.
Changes in workflows
The technique is entirely transparent to the user, requiring absolutely no change to the way a scene is set up. It also works nicely with mouse follow and region rendering.
In the case of region rendering, there is no need to change bucket sizes to make them fit a small region, while mouse follow will also automatically split any remaining buckets, regardless of user interaction.
It will, however, allow for bigger buckets to be used and it will maintain the bigger, more efficient buckets for longer compared to the old splitting method.
Care should be taken to not choose too big an initial size for the buckets, , as this may cause other drawbacks.
In essence, there is no need to choose small bucket sizes for the image to complete more efficiently: the new algorithm will perform optimally with default (or bigger) sizes.
As a corollary, it will also ameliorate the known issues with Depth Of Field and Motion Blur sampling (small buckets have a higher chance to miss samples).
Where to get it
The algorithm will be present in V-Ray 5 for 3ds Max, update 2, hotfix 3 and onwards. You can get the update here. It will later be extended to all other DCC integrations.


 © Hagen Gilbert
© Hagen Gilbert Mintviz © Bush Furniture
Mintviz © Bush Furniture Mondlicht Studios, Rhubarb Agency © Amazon Studios
Mondlicht Studios, Rhubarb Agency © Amazon Studios © Škoda Design
© Škoda Design